|
We are striving towards making our robots more intelligent, stronger and faster. We want them to be able to move their bodies swiftly. We want them to be at least as swift as humans or even more if possible. So far, we have recorded an exponential growth in the intelligence of robots but in terms of physical speed, we haven't made much progress. We use electric motors as our primary source for producing motions in robots. Motors can get really fast but fast motors aren't strong enough to help the robots to lift things. Strong motors with much higher torque are slower. If you want both, the power consumption is high and you still can't get a very good combination of speed and power.  So, how are we humans so fast as well as strong? Why don't we make something human like? It is our Muscles! We have found a solution! If we our able to build muscles and place them inside a robot, it would become fast and strong. How Could we make Muscles?We just can't ask god, "Oh God! How did you make our Muscles? Teach me to make muscles!". We have to find it out ourselves. Scientists have worked hard and finally found different ways to make electronic muscles. Some of the ways we could make muscles are -
Hydraulic ActuatorsHydraulic Actuators using large cylindrical actuators are one of the oldest methods of creating strong robotic arms. Its works on the principle of Pascal's Law - F = P x A 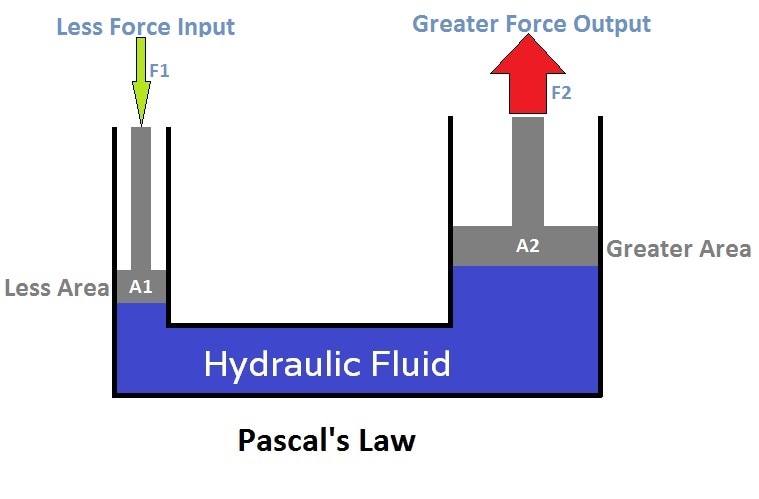 P = F1 / A1 and P = F2 / A2 As pressure is same, F1 / A1 = F2 / A2 F2 = (A2 / A1) x F1 If you apply a less force to a small area, you can get a larger force on a greater area, as pressure is constant i.e. if A2 is much greater than A1, we can amplify F1 to a large extent and get a high force output. Where do we bring the pressure from? We would use pumps operated by electrical power. Sometimes it is better to use a diesel engine to output more power to large cranes. But for a smaller robot, electrical pumps are good enough. There is a limitation to it. The output piston drives at a much lower speed. Modifications to this can help us achieve various speeds or even variable speeds. I'm not going in details of the variations. This has several advantages
Pneumatic Artificial MusclesThese are similar to hydraulic actuators. They were developed in 1950s to create artificial limbs. It consists of a flexible bladder connected to a pump which pumps in or out pressurised air. When the bladder fills up, it has to occupy more volume. So, it contracts in length. This is similar to the way human muscles work. We can move our hands by a combination of contraction and relaxation of our muscles. These muscles could be used in pairs of two (like our biceps and triceps) to move and arm. The following GIF animation from Wikipedia could give you an idea of how it works -  Pneumatic Artificial Muscles Photo : Wikipedia It has many advantages over hydraulic actuators, the most important being the power to weight ratio. Hydraulic Actuators are strong and powerful. But they are heavy - very heavy. In contrast, Pneumatic Actuators have a high power to weight ratio. They are very light and small. Building smaller actuators is easy. We could even use a complex set of muscles with the Pneumatic Actuators. The limitation to it is that its force is limited by the pressure the bladder can handle. Two high pressure could lead in making the muscle burst. This technology is gas operated. But, we could even use a liquid. A liquid would rather provide more mechanical stiffness than a gas. Finally Pneumatic Muscles have these advantages -
Shape Memory MusclesSome Alloys, called Shape Memory Alloys exhibit properties that helps them 'Remember' their shape! When they are heated to a high temperature and then shaped into a desired shape. When cool, they can be bent or deformed. When they are heated slightly, they move and regain their original shape they were shaped into first! It is just incredible! They can also bend and regain their shape on application of current. This property of these alloys is useful in various applications. We could bend these wires in the shape of a spring. Then use them as muscles. When they are stretched, they get deformed. On application of heat or current, they would contract to form the spring again. This operation could be used as muscles. Just like muscles contract and relax, they can also contract and relax. Just like the above two, it also has limitations. The deformation of Muscle Wires should not exceed a certain limit, beyond which, they won't regain their shape. Also, they cannot provide much mechanical stiffness to the system. They have to be supplied with power continuously to make the arm remain in a static state. Advantages of shape memory alloys are -
So, which is the best?All these different ways to make muscles have their own advantages and we can't rank them in a single list. Each has its own different applications and benefits. Hydraulic Actuators are good for very big and strong robots. Pneumatic Muscles good for smaller, more human scaled robots. While, Shape Memory Wires are good for even smaller robots. There are many other ways out their that can be used to create artificial muscles. Widely, they are similar to the above. But the ways they are operated are different. If you want me to write about another Artificial Muscle, you could Contact Me! Thanks for Reading! Do share and comment.
2 Comments
|
Categories
All
AuthorAnish Sharma - A Student and the owner of this website. Archives |
 RSS Feed
RSS Feed
